
Development of a robotic solution for flacon handling

Our customer: HEINZ GLAS Decor s.r.o.
HEINZ GLAS Decor s.r.o. was founded in 1995 as a subsidiary of the German family-owned company HEINZ-GLAS GmbH & Co. KGaA, whose history goes back almost five centuries. Glass bottles were produced from the very beginning. Even today, HEINZ-GLAS concentrates exclusively on the production of glass flacons of various designs and shapes used in the perfume and cosmetics industry.
What was our assignment?
After the glass flacons have been produced, they are often further processed on special machines. This means they have to be fed into the machine, an activity that was previously carried out exclusively by hand. The customer's requirement was to replace this monotonous work with a robotic workstation in order to speed up the entire process. Within the scope of the request, the customer specified several types of products for which it was necessary to develop an ideal gripper for correct and above all fast gripping of the bottles.
How did we handle it?
The solution proposed by the Blumenbecker experts is to load the flacons in whole rows into the machine for further processing and not individually, as was previously the case.
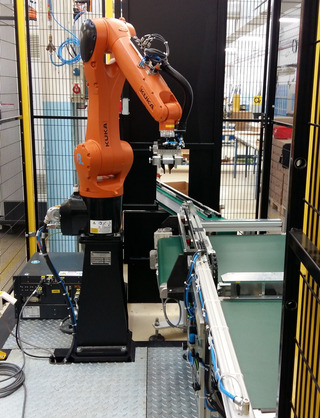
The process is as follows: The operator loads an open container with flacons arranged in rows onto the feeding belt, which transfers them to the robot. The robot takes a complete row of flacons and places them on the adjacent conveyor belt that takes them to the next machine. The container is tilted slightly forward to prevent the remaining bottles from falling over or slipping. After all rows of flacons have been completely removed from the container, it is transferred to a belt conveyor, which returns it to the operator.
A KUKA KR10R1100sixx was chosen as the robot. The tool was designed by Blumenbecker Prag itself and consists of two 600 mm long grippers that can pull a series of bottles out of the container at once.
The electrical part of the project consists of the SIMATIC S7-1500 control system with CPU IM1512SP F-1PN together with the Simatic I/O modules. Safety circuits of the workplace are solved by using SAFETY I/O modules. For the visualization and control of the workplace in the service mode, the Siemens KTP900 control panel is located on the switchboard. The robot gripper sensors and actuators are integrated into a passive interface from Balluff, the sensors and actuators of the transfer tables and conveyors are integrated into IO-Link interfaces from Balluff. The workplace is equipped with a fencing from a TROAX kit and has one entrance door. The following control elements are located at the entrance door to the workplace: an emergency stop button, a check-in button and a beacon for status indication.
Benefits
Thanks to the solution developed by Blumenbecker, continuous and error-free filling of the processing machine is guaranteed without interruptions. The staff previously used to fill the machine with flacons can now be used more productively elsewhere.

Our customer says:
»We are very satisfied with the technical solution and the quality of Blumenbecker's work. The entire project was completed on schedule and brought immediate economic results.«