
Robotické zašroubování a utažení šroubů na autosedačce
Co bylo naším úkolem?
Na začátku projektu vznikl požadavek zákazníka částečně eliminovat lidský faktor ve šroubovacích operacích při výrobě automobilových sedaček. Samozřejmostí byla nutnost splnit nejen kvalitativní, ale především časové a rozměrové parametry celé operace. Výzvou byla samotná integrace robotické buňky do malých prostor stávající linky. Proveditelnost tohoto úkolu jsme museli ověřit nejprve komplexní simulací. Teprve po odsouhlasení simulace jsme přistoupili k vlastní realizaci.


Jak jsme si s tím poradili?
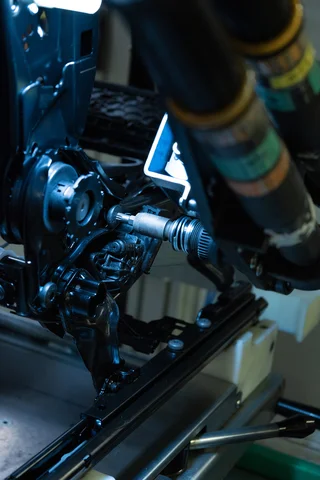
Základem robotické buňky je průmyslový robot s kamerovým viděním a automatickým šroubovákem, který dotahuje předmontované šrouby dle parametrů požadovaných výrobním postupem. Pracoviště se dále skládá z kontroléru šroubováku, rozváděče a bezpečnostního řešení.
Hlavním cílem této aplikace je přesné navedení robota na střed díry šroubu, jejíž pozice je proměnlivá. Po najetí robota do správné pozice dojde k samotnému zašroubování. V případě rozdílných šroubů musí robot přepínat mezi různými programy šroubování (počáteční moment, koncový moment, úhel, aj.).
Bezpečnost celého pracoviště je na prvním místě. Certifikované oplocení, bezpečnostní zámky a závory, posuvné dveře, nárazové lišty a tlačítka nouzového zastavení, jsou tedy samozřejmostí.
Řídicí systém robotického pracoviště na bázi PLC s integrovaným operátorským rozhraním disponuje otevřeným komunikačním rozhraním a pokročilou diagnostikou. Veškerá data mohou být odesílána do nadřazeného systému zákazníka. Změřené parametry šroubování také umíme pomocí vlastního řešení ProDaSt průběžně ukládat do SQL databáze. Aktuální stavy aplikace a diagnostiku zobrazuje operátorský panel, včetně počítadla kusů a historie zašroubovaných kusů.
Součástí pracoviště je kompletní dokumentace potřebná k jeho provozu a údržbě, včetně Prohlášení o shodě.
Robotická buňka může fungovat jak v režimu stand-alone tak jako součást nových nebo existujících výrobních linek.