
Entwicklung einer Robotiklösung
für das Flakonhandling

Unser Kunde: HEINZ GLAS Decor s.r.o.
HEINZ GLAS Decor s.r.o. wurde 1995 als eine Tochtergesellschaft des deutschen Familienunternehmens HEINZ-GLAS GmbH & Co. KGaA gegründet, dessen Geschichte fast fünf Jahrhunderte zurückreicht. Von Anfang an wurden Glasflaschen hergestellt. Auch heute konzentriert sich HEINZ-GLAS ausschließlich auf die Herstellung von Glasflakons verschiedener Designs und Formen, die in der Parfüm- und Kosmetikbranche eingesetzt werden.
Die Aufgabe
Nach der Produktion der Glasflakons werden diese auf Spezialmaschinen häufig noch weiterbearbeitet. Dafür müssen sie der Maschine zugeführt werden, eine Tätigkeit, die bislang ausschließlich von Hand erfolgte. Diese monotone Arbeit sollte durch einen Roboterarbeitsplatz ersetzt werden.
Leistung
Die von den Blumenbecker Experten vorgeschlagene Lösung sieht vor, dass die Flakons in ganzen Reihen in die Maschine für die Weiterbearbeitung geladen werden und nicht einzeln, so wie bisher.
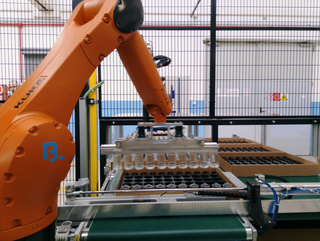
Der Prozess läuft wie folgt: Der Bediener lädt einen offenen Behälter mit reihenweise angeordneten Flakons auf das Zuführband, das sie an den Roboter übergibt. Dieser entnimmt eine komplette Reihe Flakons und setzt sie auf das benachbarte Förderband, das sie zur nächsten Maschine bringt. Der Behälter wird dabei leicht nach vorn gekippt, um ein Umfallen oder Verrutschen der verbliebenen Flakons zu vermeiden. Nach vollständiger Entnahme aller Flakonreihen aus dem Behälter wird dieser an einen Gurtförderer übergeben, der ihn zum Bediener zurückbringt.
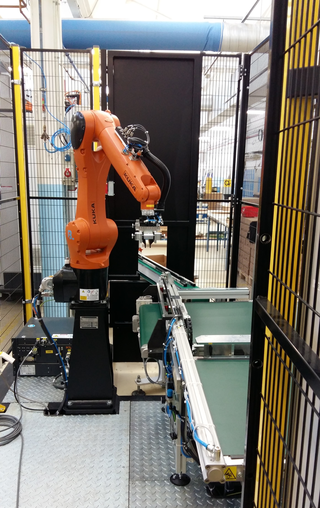
Als Roboter wurde ein KUKA KR10R1100sixx gewählt. Das Werkzeug wurde von Blumenbecker Prag selbst konstruiert und besteht aus zwei 600 mm langen Greifern, die eine Reihe von Flakons auf einmal aus dem Behälter herausziehen kann.
Der elektrische Teil des Projekts besteht aus einer Steuerung SIMATIC S7-1500 mit CPU IM1512SP F-1PN und den Simatic I/O-Modulen. Sicherheitsschaltungen am Arbeitsplatz werden durch den Einsatz von SAFETY-I/O-Modulen gelöst. Für die Visualisierung und Steuerung des Arbeitsplatzes im Servicemodus befindet sich ein Siemens KTP900 Bedienfeld auf der Schalttafel. Die Sensoren und Aktoren der Robotergreifer sind in ein passives Interface von Balluff integriert, die Sensoren und Aktoren der Übergabetische und Förderer in E/A-Hubs von Balluff. Der Arbeitsplatz ist mit einer Umzäunung aus einem TROAX Bausatz ausgestattet und besitzt eine Eingangstür mit folgenden Bedienelementen: eine Not-Aus-Taste, eine Check-in-Taste und eine Signalleuchte zur Statusanzeige.
Vorteile
Dank der von Blumenbecker entwickelten Lösung ist eine kontinuierliche und fehlerfreie Befüllung der weiterverarbeitenden Maschine ohne Unterbrechungen gewährleistet. Die bislang für das Befüllen der Maschine mit Flakons eingesetzten Mitarbeiter können anderswo produktiver eingesetzt werden.

Unser Kunde sagt:
»Wir sind mit der technischen Lösung und der Qualität der Arbeit von Blumenbecker sehr zufrieden. Das gesamte Projekt wurde innerhalb des Zeitplans realisiert und hat unmittelbare wirtschaftliche Ergebnisse gebracht.«